

清华新VLA框架加快破解具身智能留步实验室“魔咒”
发布日期:2024-12-27 15:43 点击次数:93

DeeR-VLA团队 投稿
量子位 | 公众号 QbitAI
打算、存储蹧跶高,机器东谈主使用多模态模子的阻截被处理了!
来自清华大学的辩论者们遐想了DeeR-VLA框架,一种适用于VLA的“动态推理”框架,能将LLM部分的有关打算、内存支拨平均镌汰4-6倍。
(VLA:视觉-谈话-动作模子,代表一类用于处理多模态输入的模子)
简便来说,DeeR-VLA就像东谈主的决议系统:简便任务快速想考,复杂任务仔细想考。通过多出口架构,模子在鼓胀打算后即可提前“刹车”,幸免糜掷算力。
在CALVIN机器东谈主操作基准测试中,DeeR-VLA达成了大谈话模子(LLM)打算本钱减少5.2-6.5倍,GPU内存减少2-6倍,同期保持了性能不受影响。

大模子存在冗余性
连年来,多模态大谈话模子(MLLM)让机器东谈主具备了前所未有的贯通与现实才智。通过谈话领导和视觉信息的聚合,机器东谈主不错完成复杂任务,比如“捏起蓝色物体并放到桌上”。
一些前沿模子,如RT-2,以致不错泛化到新任务或新物体。关连词,要让这些强劲的模子走进本色场景,还有一齐穷苦需要处理——MLLM天然机灵,但也“贪馋”。
每次推理动辄调用数十亿参数,蹧跶高大的打算资源。
这关于镶嵌式机器东谈主平台来说是致命的——GPU内存不及、打算时候长、电板续航不够,径直让“通用机器东谈主”的盼望留步于实验室。
关连词本色上,在机器东谈主舍弃范畴,好多本色诈欺场景并莫得咱们设想的那么复杂。
论文作家通过不雅察发现,绝大无数任求本色上不错通过较小的模子就能完成,唯有在靠近少数复杂场景时,才需要调用齐全的大型多模态模子。
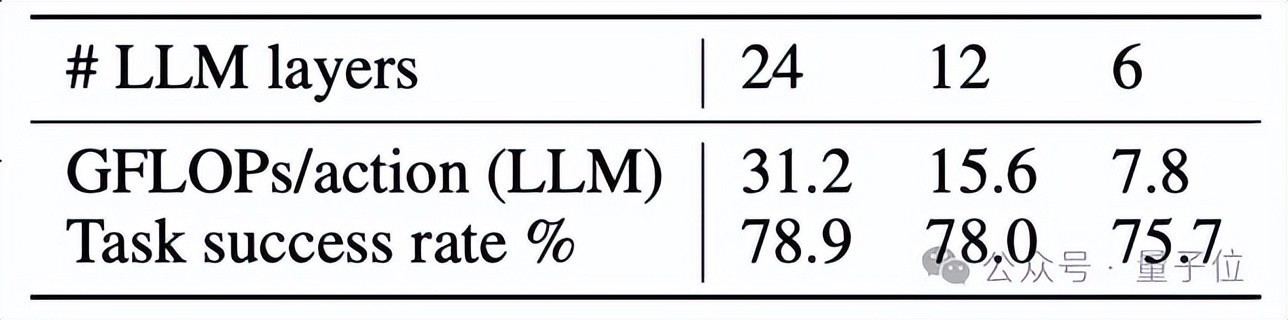
以Calvin数据集为例的实验扫尾便充分体现了这极少:当使用24层的OpenFlamingo当作基座模子时,比较于6层的模子,任务完成率仅提高了3.2%,但打算本钱却加多了整整4倍。
这无疑突显了现存的多模态大模子对大部分简便机器东谈主任务的冗余性。
这一发现激励了对现存模子遐想的深远想考:
为什么在大无数简便任务中还要使用高打算资源的复杂模子?
在很厚情况下,使用更大的模子不仅莫得带来彰着的性能进步,反而糜掷了珍摄的打算资源。
作家合计,何如左证任务的复杂性动态调养模子的限制,才能在不葬送性能的情况下,最大化打算扫尾,成为了进步机器东谈主智能的关节。

DeeR-VLA的遐想
DeeR-VLA框架的中枢在于其机动的动态推理机制,大约左证任务复杂度智能调换LLM的打算深度。
这意味着,DeeR-VLA大约在不同场景中激活纵情限制的模子。
为了达成这一谋略,DeeR-VLA引入了多出口架构,该架构能在多模态大谈话模子中按需遴选性激活不同的层级。
以下是其关节时刻组件:
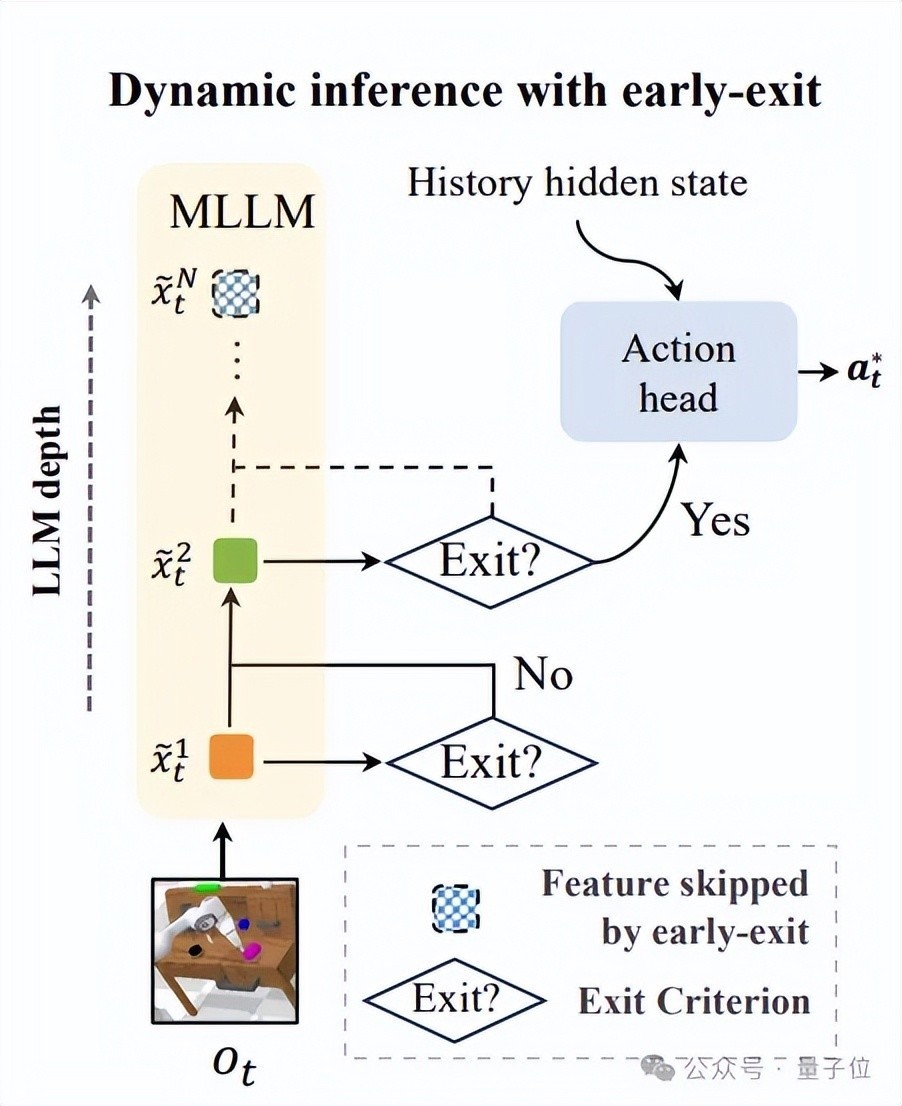
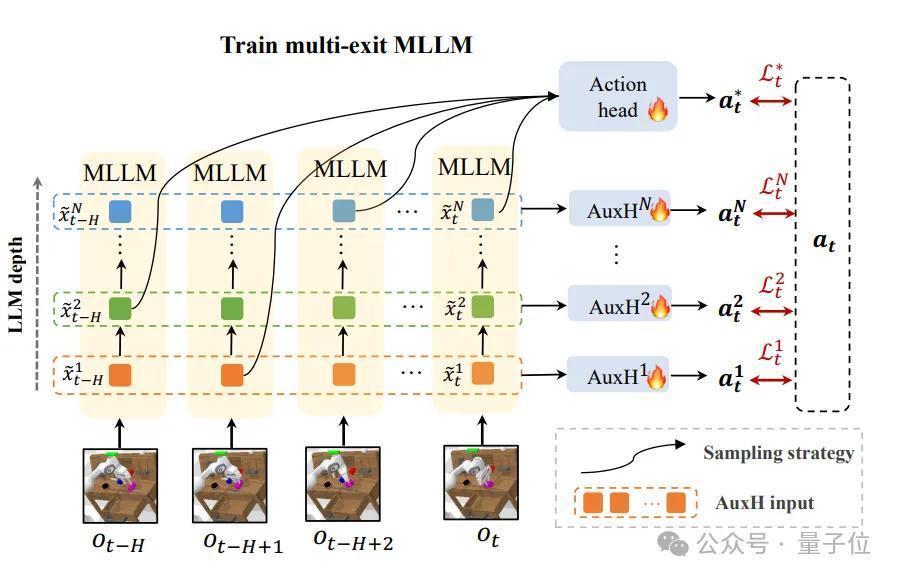
多出口MLLM结构: DeeR-VLA通过在MLLM中引入多出口架构,将模子辨认为多个阶段,每个阶段皆不错输出中间扫尾。一朝任务复杂度达到某个出口的需求,模子就会提前住手打算,幸免激活更多层级。特征池化步调: 每个出口的中间特征通过特征池化时刻进行压缩,提真金不怕火出最中枢的信息。这种步调确保即便在早期退出,模子也能生成适用于后续动作展望的高质地特征。动作展望头遐想: 在每个出口后,模子通过轻量级的动作展望头,将特征革新为机器东谈主具体的现实动作(如机械臂的位置和夹爪的开合景况)。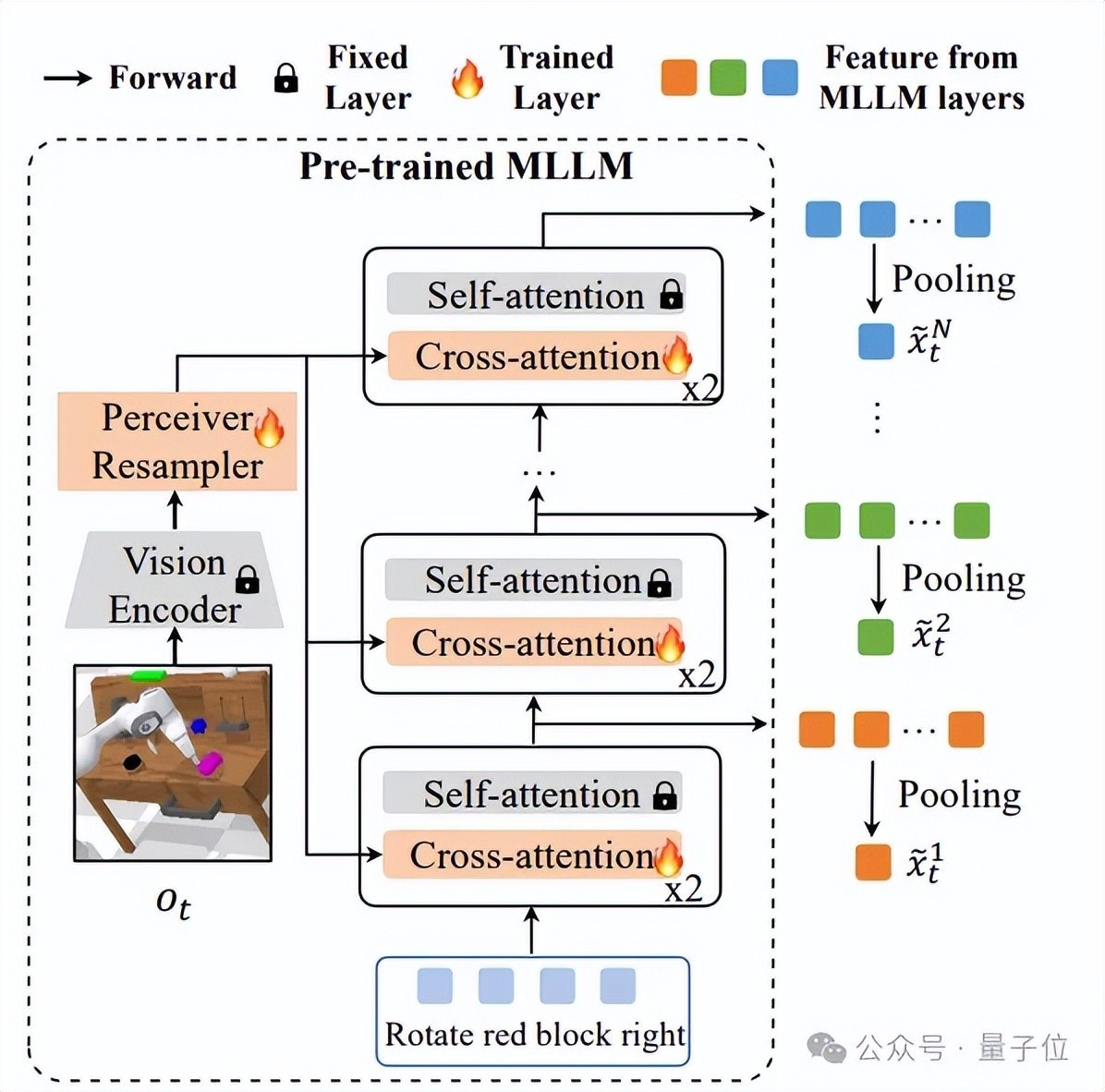
DeeR-VLA使用了一种私有的动作一致性准则来决定是否提前退出。
通过对比相邻出口的动作展望扫尾,若扫尾互异小于阈值,则意想模子还是达到敛迹景况,无需进一步打算。
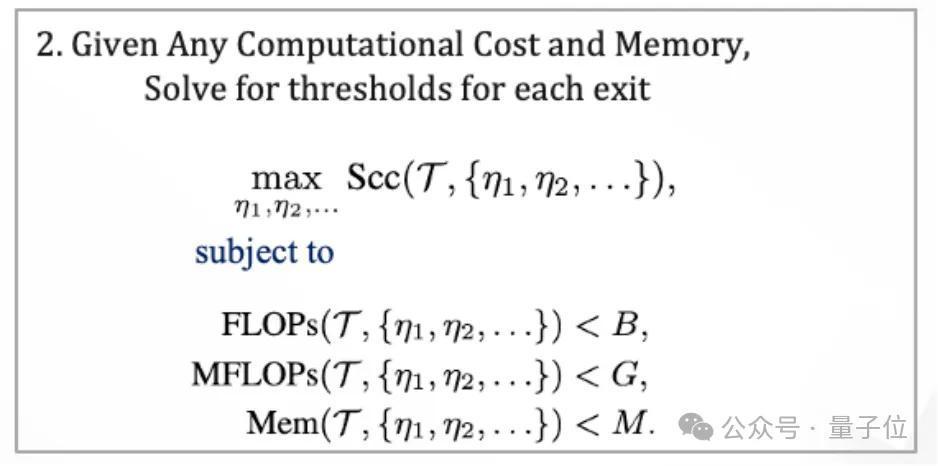
动作一致性的阈值无需手动诱骗,模子不错自动打算出合适的阈值来兴奋给定的设定平均打算本钱、峰值打算、显存预算,动态调养打算限制,以适合不同的硬件环境和及时性需求。
为了自动寻找最好退出阈值,DeeR-VLA还引入了贝叶斯优化步调。在历练或本色诈欺中,该步调通过探索和响应按捺微调退出战略,确保打算资源的最优分派。
在DeeR-VLA中,动态推理时,模子左证笃定性的圭臬在每个时候步遴选合适的出口,并集聚时序上每一个时刻的特征生成最终的展望。
关连词,在历练阶段,由于穷乏明确的休止圭臬,模子并不清醒时序上出口特征的分散,这导致历练时的行径与推理时有所不同。
为了处理这一问题,DeeR-VLA引入了赶快出口采样战略。
在历练流程中,模子在每个时候步赶快遴选一个出口进行打算,这么不错确保模子在通盘出口序列上皆能进行灵验学习,并生成高质地的展望。
这种战略灵验减少了历练和推理之间的分散互异,使得模子大约更好地搪塞动态推理流程中的不笃定性。
此外,论文作家还引入了援助展望头(Auxiliary Heads)当作独特的监督信号,对每个出口的特征进行优化,使其更稳健于动作展望任务。
实验考据
DeeR-VLA框架在CALVIN长Horizon多任务谈话舍弃挑战(LH-MTLC)基准上进行评估。该基准观点是测试机器东谈主在天然谈话领导下现实任务序列的才智,其中每个任务序列包含五个子任务。
由于多模态大模子中LLM部分占据主要的参数目,DeeR-VLA主要护理LLM部分的打算量和显存占用,而不是全体框架的节俭。
通过在不同环境诱骗下的测试,DeeR-VLA展现了出色的发达,尤其是在职务得胜率与打算扫尾之间的均衡。
与其他SOTA步调比较,DeeR-VLA在职务得胜率上保持竞争力的同期,LLM部分的打算资源蹧跶大幅减少。
举例,在D→D诱骗下,DeeR-VLA以更少的打算量(5.9倍减少的FLOPs)和2倍更低的GPU内存蹧跶,依然达到了RoboFlamingo++的性能。

为了考据DeeR-VLA在本色推理中的扫尾,辩论团队在Nvidia V100 GPU上对DeeR和RoboFlamingo++进行了比较。
扫尾标明,DeeR-VLA的LLM部分的推理时候比RoboFlamingo++减少了68.1%,且两者在职务得胜率上确实调换。
这一实考据明了DeeR-VLA框架不仅在表面上大约减少打算包袱,况且在本色诈欺中也能显赫进步推理速率。
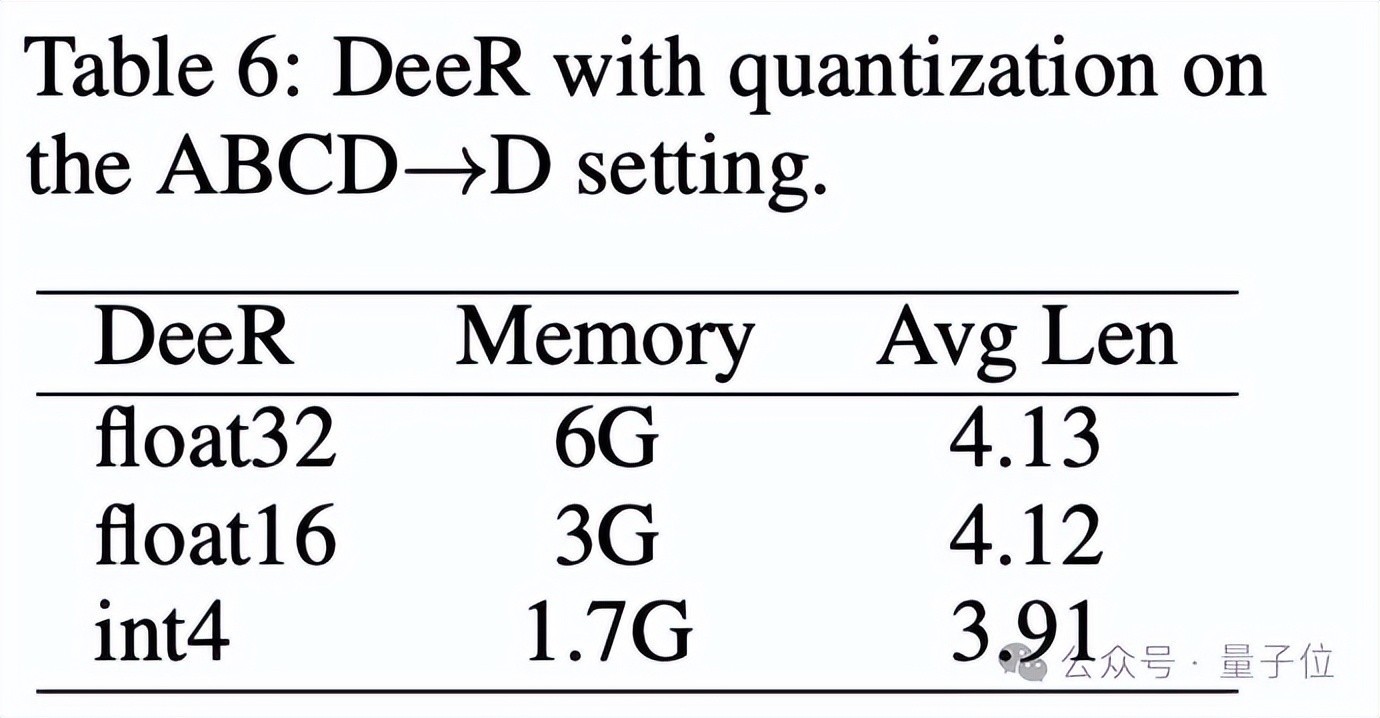
同期,DeeR-VLA框架大约与量化时刻相聚合,进一步减少模子LLM部分的内存使用。
论文作家先容
该论文的一作是清华大学自动化系三年龄博士生Yue Yang,他专注于强化学习、天下模子、多模态大模子和具身智能的辩论。
此前他当作中枢作家的论文《How Far is Video Generation from World Model: A Physical Law Perspective》被国表里广大大佬Yan Lecun,xie saining,Kevin Murphy等转发。
另一位一作王语霖相似是清华大学的博士生。两位作家的导师皆是黄高。
论文作家主页:
https://yueyang130.github.io/论文相连:https://arxiv.org/abs/2411.02359v1代码和模子相连:https://github.com/yueyang130/DeeR-VLA— 完 —
量子位 QbitAI · 头条号签
护理咱们,第一时候获知前沿科技动态约